
Since there are a good lot of robot simulators, Gazebo and Stage for the ROS enthusiast, V-REP and webots in the more commercial domain, OpenRave and Microsoft Robotics Developer's Studio are other options one can explore into, therefore when one comes across a new robot simulator, the obvious question is - so what is special about it ? I have been asked this question a few times about MORSE, and is usually accompanied with a comparison with Gazebo.
My answer is,
- MORSE is not limited to few robots (10 for Gazebo), I have used Morse for (i) 176 small robots (ATRV) and (ii) 9 PR2 robots, in 2 separate simulations. The limit to the number of robots is not a limitation of the simulator, but rather the limitation of the CPU and graphics card.
 |
| Pic.1. Multiple PR2 simulations |
- MORSE has bindings with various middlewares ROS, YARP and MOOS, which enables it more versatility [1].
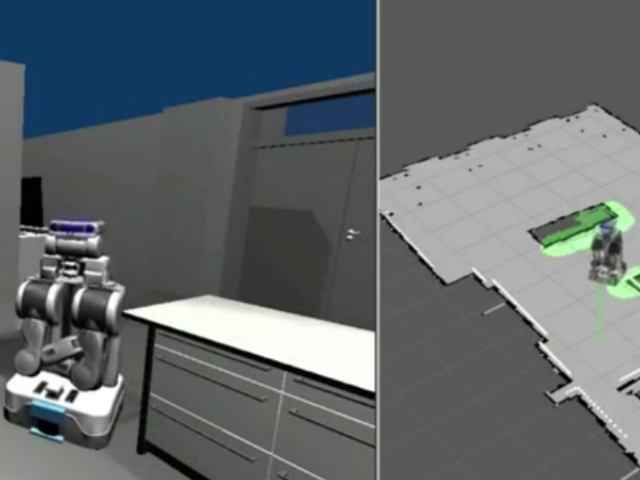 |
| Pic.2. ROS binding, rviz visualisation and mapping of MORSE simulation |
- There is facility for human robot interaction. Like in motion gaming, direct input from the motion sensor (Microsoft Kinect, ASUS Xtion or Nintendo Wiimote) enables human avatar in the simulator [2].
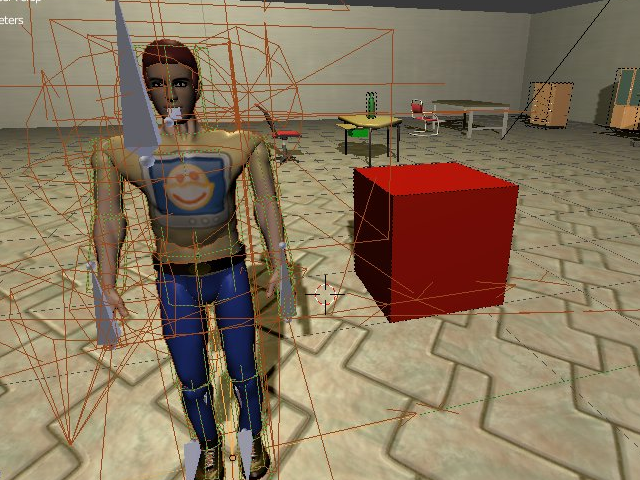 |
| Pic.3. Human avatar |
- Since everything happens through Python scripts,one need not care about compilation and executable files. MORSE is 'pythonic' [3] and can be arguably said to be an extension of Blender.
- It is based on Blender and not Ogre, so it doesn't take up a hell lot of resources. Also, the texture and the graphics are more sleeker than Gazebo.
- New robot models can be developed through Blender, and the developmental process is simple [4].
 |
| Pic.4. Blender model of the robots |
- Blender has a huge online community. Hence help and support is easy to find.
I would not be giving a very honest opinion if I do not talk about the shortcomings of MORSE,
- Binding with ROS is a laborious process and often discourages the novice ROS user, particularly due to Python 3 and also because only certain versions of Blender works well with the MORSE + ROS + Python 3 set-up.
- Physics simulation in Blender/MORSE is inferior to Gazebo. Getting force, torque values etc is not yet possible.
The latest release is MORSE 1.2 and more details can be found at http://www.openrobots.org/wiki/morse. A good part of this post came out of discussions at the MORSE mailing list, morse-users at laas dot fr .
REFERENCES